




Help Us Build a Mars Rover
After a successful competition this past summer with our latest rover, Cayuga, the members of Cornell Mars Rover are already hard at work designing a brand-new rover from the ground up. We’re focused on improving existing systems, introducing innovative new ones, and sourcing components that will make this year’s rover our best yet. Your support will not only accelerate our progress but also help us develop entirely new projects and bring more team members to competition. Read below to learn about our subteams and the exciting work you can help bring to life!
About the team
Cornell Mars Rover (CMR) is a premier student-run engineering team comprised of over 50 members from across Cornell's undergraduate colleges. Each year, CMR designs an innovative rover to compete in the international University Rover Challenge, in which the team tackles challenges such as autonomous navigation, on-site science experimentation, and extreme terrain traversal. Since its inception in 2010, CMR has achieved several milestones during competition, such as earning 6th in the world in 2019. Students work collaboratively to design, build, and test the rover, exploring cutting edge technologies such as machine learning, wireless communications, CNC, and 3D printing.
Subteams
Drives
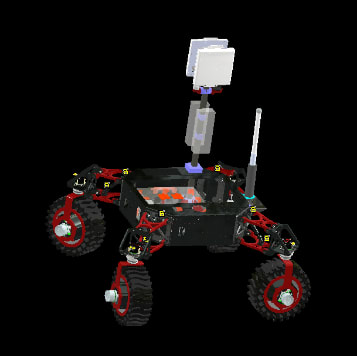
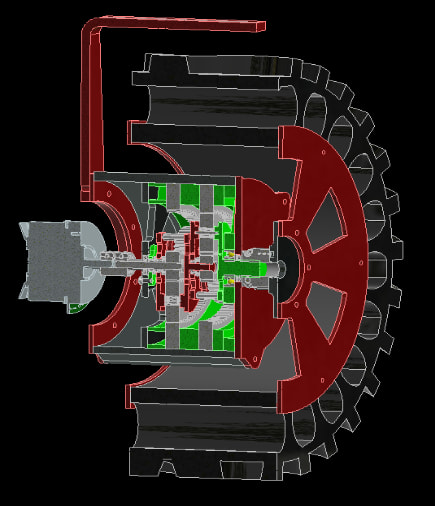
The Drives subteam designs and assembles the suspension, wheels, and frame of the rover. Drives acts as the central hub for all attachments to the rover whether they be mechanical, such as the arm, or electrical, such as the electronics core. This year, projects include a dual wishbone suspension with coil-over shocks and larger 3D-printed TPU wheels, an octagonal frame with a large internal volume and component-mountable exterior, and a carbon-fiber camera mast that houses the rover's depth-perception camera and radios.
Arm
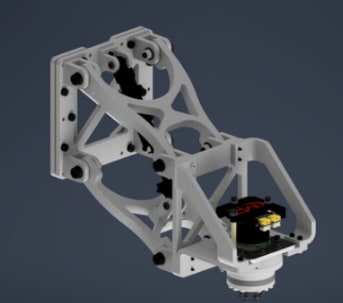
This year’s arm is being designed with the ultimate goal of maximizing end-effector manipulability through a technique called inverse kinematics (IK), which allows our arm to move in a fluid and cohesive manner. A new "mini-arm" allows for precise and intuitive control of the arm through teleoperation of a scaled-down version of the system. This year's end effector design will be able to precisely manipulate objects, perform dexterous tasks, and have a strong grip on heavy objects for both the Equipment Servicing and Extreme Delivery missions. An offset elbow linkage repositions the elbow gearbox to the base of the arm, reducing the moment load experienced when the arm is fully extended.



Astrotech
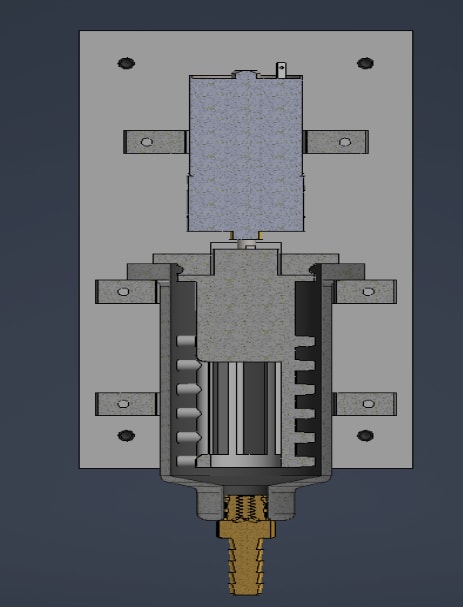
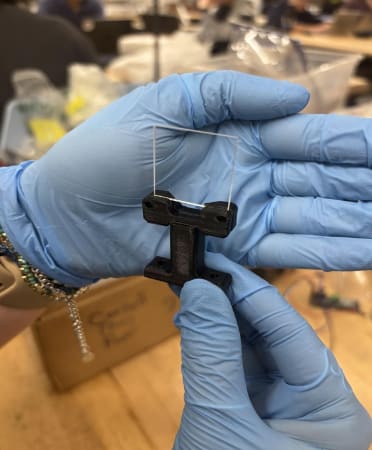
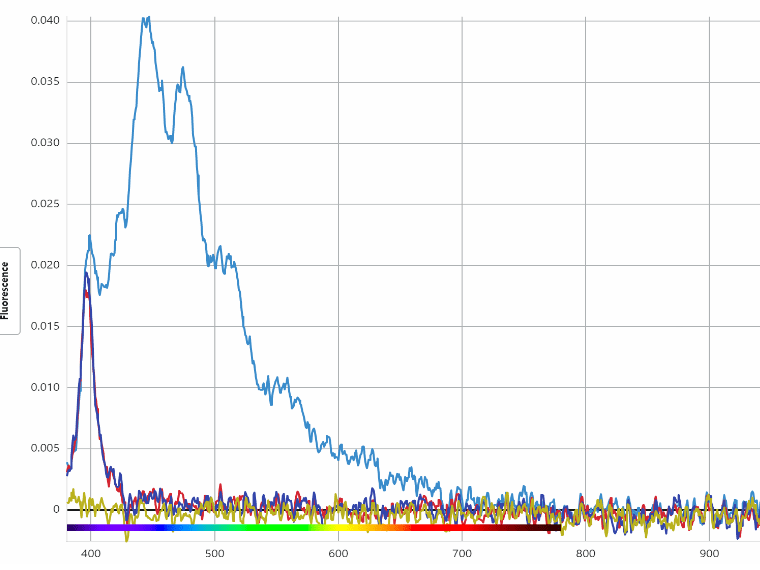
AstroTech designs and builds an automated biochemistry lab onboard the rover with the goal of determining the presence of extinct or extant life in collected soil. This year's soil collection system will be a frame-mounted auger drill capable of collecting soil from a depth of 10cm into the ground. Bead-beating cell lysis breaks open cells by vigorously stirring the soil-solvent mixture with small beads, which physically disrupts cell walls and membranes to release their contents. Our Raman spectroscopy analysis system uses lasers and optics to the soil-solvent sample in a cuvette, producing a graph with distinct peaks that represent the various proteins present based on how the laser light interacts with the sample.

Science
The Science subteam is responsible for designing and implementing an experimental payload that will access soil composition and geologic features remotely. The current tests planned for the Science mission involved processing soil samples by filtering, mixing, and lysing cells, then combining them with reagents for analysis using a spectrometer or camera to detect chemical and biological signatures.


Electrical
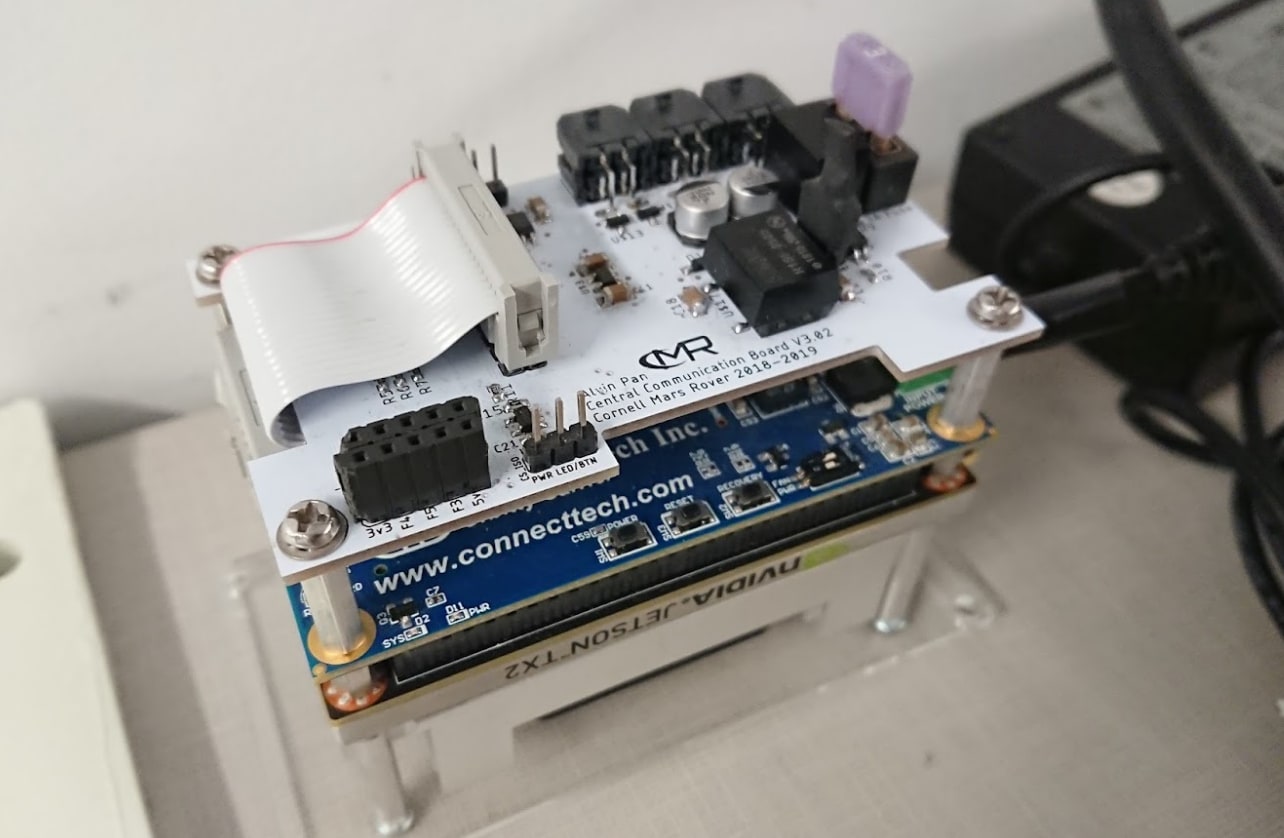
The Electrical subteam designs and develops the rover’s electronics from the ground up, creating flexible systems that integrate seamlessly with mechanical and software components. Projects includes circuit and PCB design, microcontroller programming, motor control, sensors, and embedded communication protocols with CAN-FD.

Software
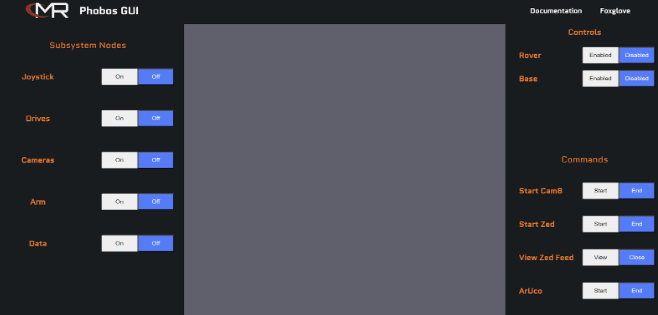
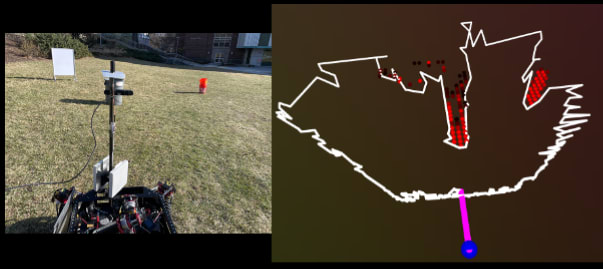
The software subteam handles rover controls, path planning, user interfaces, and computer vision. Projects this year include controlling the arm via inverse kinematics and autonomous navigation, keyboard typing, and point cloud object detection. ROS is used for rover controls, which is the industry standard operating system for robotics.

As a registered student organization, we are committed to equal access to all of our programs and do not discriminate based on any protected identity status.
$5
Ingenuity
Help our team purchase the base materials for the rover such as nuts, bolts, and aluminum.
$50
Sojourner
Help us purchase the hardware and software used to build the rover. These include everything from the onboard GPS to carbon fiber tubing.
$100
Spirit
Help us machine the rover and purchase a wide array of filaments for 3D printing. This year, we hope to print larger, stronger wheels with TPU.
$500
Opportunity
Help us purchase new brushless motors for the arm and drives, an on-rover laboratory for science, and new computer vision hardware for autonomous navigation.
$1,000
Curiosity
Help us fund our most ambitious projects, including custom planetary gearboxes for drives, a 100% carbon fiber arm, and advanced lasers and optics for soil analysis.
$2,000
Perseverance
Ensure CMR's ability to bring more members than ever to competition and succeed for years to come. This will help outfit our team with cutting edge technologies from the edges of material, computer, and biological sciences.