

Help Build a Mars Rover
Coming off a 6th place finish at the 2019 University Rover Challenge, the CMR team is back in full swing, designing a rover that is more innovative and challenging than ever before. Our plans include new high-resolution 3D cameras, a full redesign of the arm, and a brand new on-board science experimentation system. We need your help to bring our designs to life!
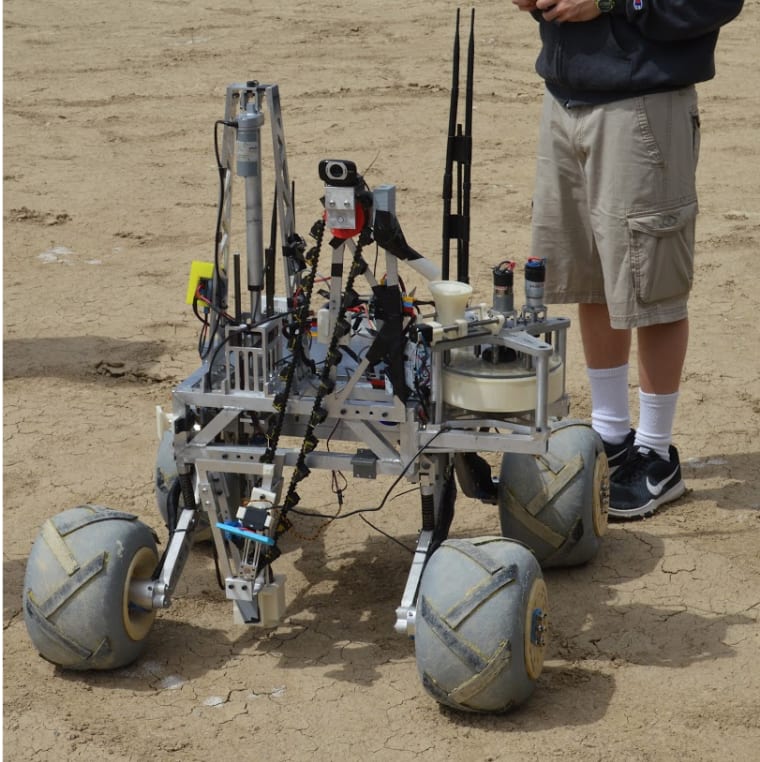
About the Team
Cornell Mars Rover (CMR) is a premier student-run engineering team comprised of over 45 members from across Cornell's undergraduate colleges. Each year, CMR designs an innovative rover to compete in the international University Rover Challenge, in which the team tackles challenges such as autonomous navigation, on-site science experimentation, and extreme terrain traversal. Since its inception in 2010, CMR has consistently placed well, earning 6th in the world at the 2019 competition. Students work collaboratively to design, build, and test the rover, exploring cutting edge technologies such as machine learning, wireless communications, CNC, and 3D printing.
The Subteams
Arm
This year’s arm is being remodeled to take advantage of the incredible resources we have at Cornell, with the ultimate goal of maximizing end-effector manipulability through a technique called inverse kinematics (IK). While this may sound like a scary engineering term, we use inverse kinematics every day. Imagine when picking up your morning coffee, you could only use your shoulder, elbow, and wrist one joint at a time. Imagine how unintuitive and inconvenient that might be? Inverse kinematics allows our arm to move in a fluid and cohesive manner. In order to meet the precision requirements of IK, CMR is custom designing a "Strain Wave Generator" gearbox and using a high-performance plastic called TECAPEI as well as Ultra-High-Modulus Carbon Fiber (a material that is 20% lighter, 13 times stiffer and 10 times stronger than aluminum).


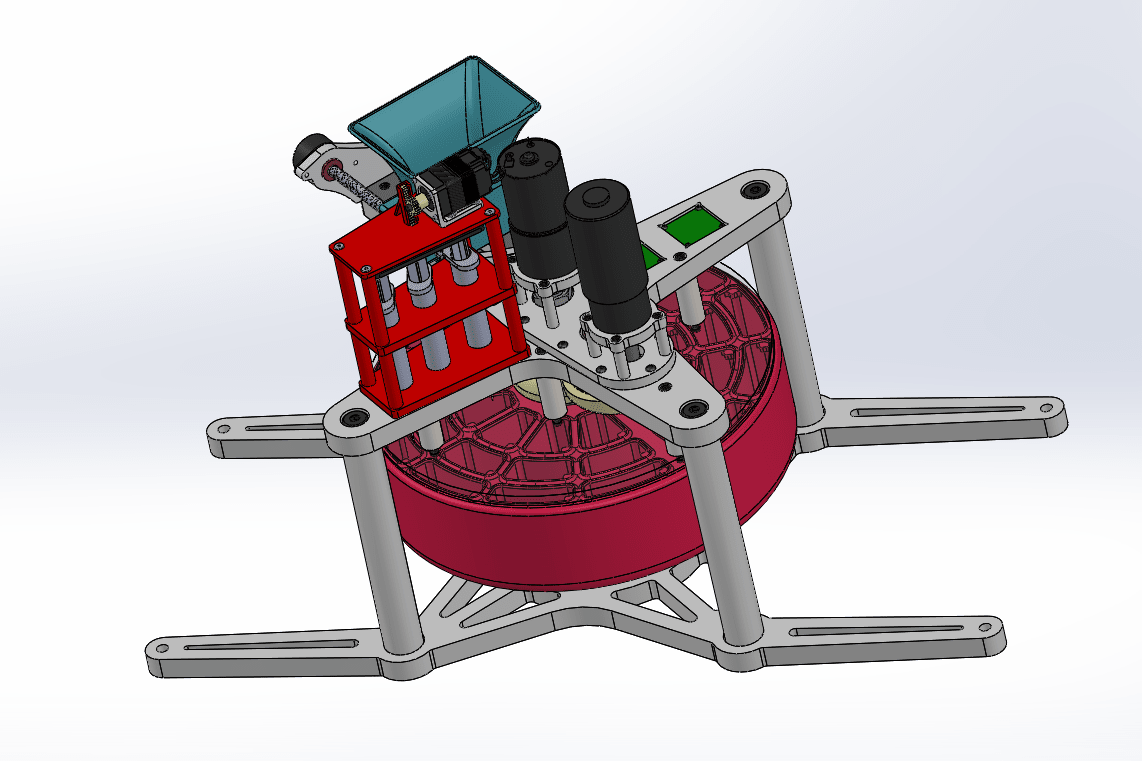
AstroTech
AstroTech designs and builds an automated biochemistry lab onboard the rover. We are designing a system to react soil with up to 25 aqueous reagents to determine the presence or absence of life in the soil. We are building a vertical screw conveyor to intake various types of soil without cross-contamination. We are testing a camera with a motorized set of filters, allowing the rover to perform reflectance spectroscopy.

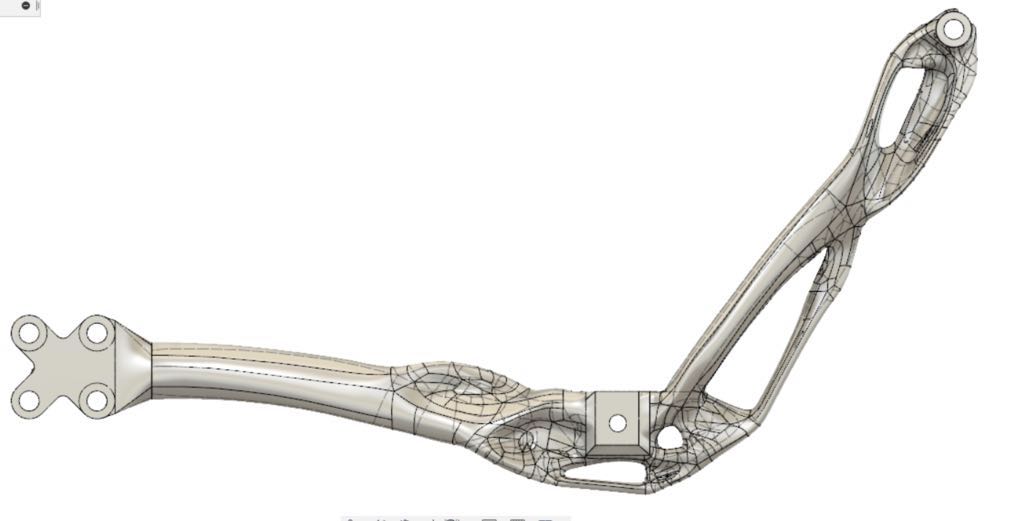
Drives
Drives designs, manufactures, and constructs the skeleton of the rover. We act as the central hub for all attachments to the rover whether they be mechanical, such as the arm, or electrical, such as the electronics core. This year we will be experimenting with generative design to create optimized suspension linkages. We will also begin research for moving to 3D printed wheels for future rovers.
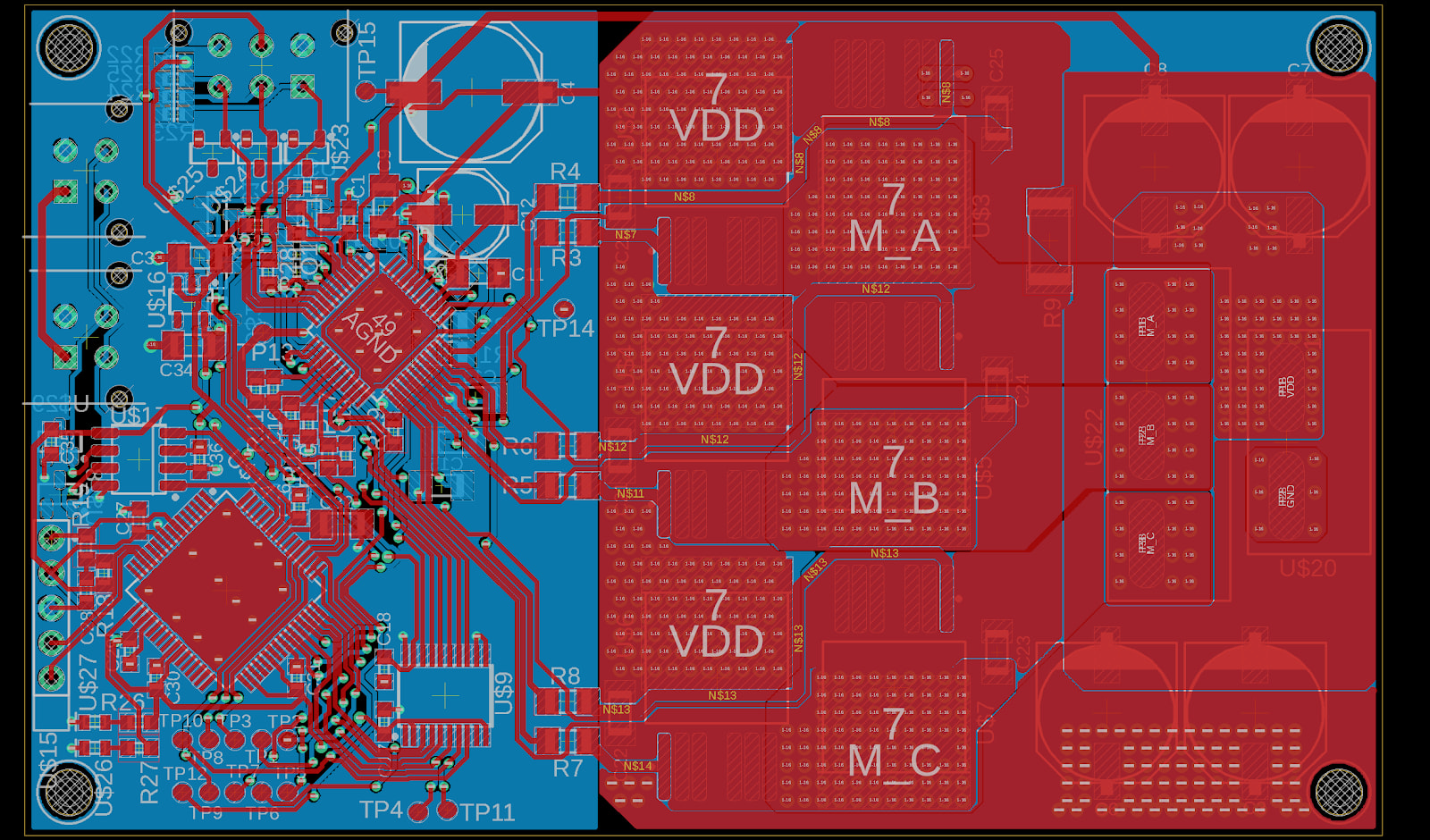
Electrical
The electrical sub-team on Mars Rover develops the hardware to run all systems on the rover. We manage communication between the basestation and the rover, handle low level control of motors and sensors, and manage power on the rover. This year we're developing brushless motor drivers and also working on general improvements to the system across the board. Since many mechanical components on the rover are not finalized until later in the year, we are responsible for designing flexible and robust hardware that can be adapted to changing designs.

Software
The software subteam handles rover controls, path planning, user interfaces, and computer vision. Our projects this year include controlling the arm via inverse kinematics, augmenting autonomous path planning using LIDAR and an enhanced computer vision system to guide our algorithms. Our focus for URC 2020 is to improve autonomous performance through these object detection and obstacle avoidance strategies.


Science
The Science sub-team is responsible for designing and implementing an experimental payload that will access soil composition and geologic features remotely. Currently, the experiments are astrobiology focused with the goal of accessing whether like is extant or recently extinct. This is accomplished through a series of organic and inorganic soil analysis tests paired with spectroscopic imaging of surface albedo.


$5
Houston, we have a donor!
A Donation of $5 - $49 will help our team purchase the base materials for the rover such as nuts, bolts, and aluminum.
$50
Keep on Rovin' On
A donation of $50 - $99 will help us purchase the hardware and software used to build the rover. These include everything from the onboard GPS to carbon fiber tubing.
$100
Blast Off
A donation of $100 - $499 will help us machine the rover. This year, we hope to augment our machining with industry-level gear manufacturing and innovative wire EDM techniques
$500
Shoot for the Stars!
A donation of $500 - $999 will help us explore new brushless motors for the arm, an on-rover laboratory for science, and new computer vision hardware for autonomous navigation.
$1,000
Out of this World!
A donation of $1000 - $1999 will help us fund our most ambitious projects, including a new harmonic drives system, a 100% carbon fiber arm, and GPU enhanced processing unit for AI navigation.
$2,000
Space: The Final Frontier
A donation of over $2000 will ensure CMR's ability to succeed for years to come. This will help outfit our team with cutting edge technologies from the edges of material, computer, and biological sciences.